Suche
News
Youtube Kanal CG

Sie sind hier
Projektgruppe: Telerobotik mit 3D-Sensoren und Virtual Reality
Semester:
2014-2015 Wintersemester
Dozent:
Ort/Zeit:
H-A 7114, Mo. 16.00-18.00
SWS/LP:
20-30 LP (je nach Studiengang)
Empfohlen für:
Master Inf./Bildinf./Medieninf., AINF-ET, AINF-MW
Voraussetzungen:
CG I, CG II (opt.), CGIII (opt.), VR (opt.), Vis (opt.)

Aktuelles:
Das erste Treffen der Projektgruppe findet am Montag, 6.10.2014 um 16:00 ct in Raum H-A 7114 (VR Labor) statt.
Telerobotik erlaubt nicht nur das Fernsteuern eines Roboters, sondern auch die Visualisierung der Sensordaten, die der Roboter sammelt. So hat der Operator einen Eindruck von dem Einsatzort, an dem sich der Roboter befindet.
Ziel dieser Projektgruppe ist es, das räumliche Umfeld eines Roboters so zu erfassen, dass ein realistisches Abbild davon im Virtual Reality Labor
erzeugt werden kann. Auf diese Weise soll der Operator einen sehr realistischen Raumeindruck bekommen, um den Roboter genauer und natürlicher lenken zu können.
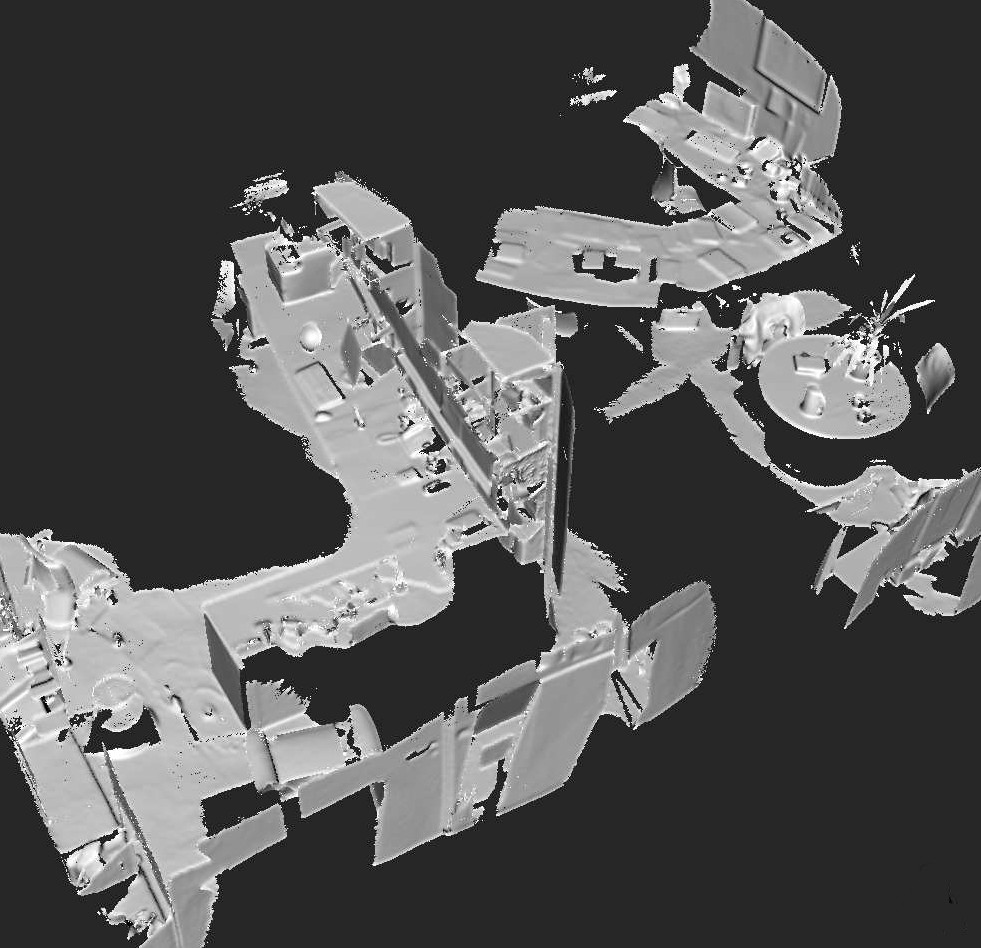
Zu diesem Zweck soll eine fernsteuerbare Roboterplattform mit einem aktuellen 3D Sensor ausgestattet werden, beispielsweise mit der Microsoft Kinect
Kamera. Die Sensordaten sollen auf dem Roboter in ein 3D Umgebungsmodell einfliessen. Diese rechenintensive Aufgabe kann mit Hilfe von Grafikprozessoren in Echtzeit erledigt werden; ein entsprechendes System wurde am Lehrstuhl entwickelt.
Das 3D Umgebungsmodell soll dann möglichst verzögerungsfrei an das Virtual Reality Labor übertragen werden, wo es als virtuelle Umgebung für den Operator dargestellt wird. Der Operator kann nun diese Umgebung erkunden und dazu den Roboter mitsamt 3D Sensor steuern.
Herausforderungen für die Projektgruppe sind unter anderem die folgenden:
- Erweiterung der Roboterplattform mit Tiefensensoren.
- Echtzeit-Erstellung eines geeigneten 3D Umgebungsmodells. Hier kann auf bestehende Lösungen des Lehrstuhls zurückgegriffen werden.
- Übertragung eines 3D Umgebungsmodells über das Netz, mit laufenden Updates.
- Rendering des 3D Umgebungsmodells in einer für das Virtual Labor geeigneten Weise.
- Schaffung von Interaktionsmöglichkeiten im Virtual Reality Labor, die sowohl Erkundung der Umgebung als auch Fernsteuerung des Roboters erlauben. Hier können z.B. Playstation Move Controller zum Einsatz kommen.
Das für den erfolgreichen Abschluss der Projektgruppe zu erreichende Ziel ist, eine Roboterplattform mit 3D Sensor zu bestücken und diesen Roboter vom Virtual Reality Labor aus fernsteuerbar zu machen. Dazu muss ein Umgebungsmodell erstellt und laufend aktualisiert werden, so dass es möglichst verzögerungsfrei im Virtual Reality Labor dargestellt werden kann. Das Arbeitsergebnis muss in einem Abschlussbericht dokumentiert werden. Je nach Zwischenergebnissen und Verlauf der Projektgruppe können Umfang und Art der verschiedenen Bausteine in Absprache mit den Betreuern variiert werden.
Zur Teilnahme an dieser Projektgruppe sollte jeder Teilnehmer vor allem Teamgeist, Ausdauer und Interesse an der Computergraphik mitbringen. Die Vorlesung CGI setzen wir mit bestandener Prüfung voraus. Darüberhinaus sollte auch schon mindestens eine weitere relevante Vorlesung besucht worden sein, z.B. das Grafikpraktikum, CGII oder CGIII, Visualisierung oder Virtual Reality.
Die Projektgruppe startet im Wintersemster 2014. Bei Fragen melden Sie sich bitte bei Martin Lambers.